(* denotes equal contribution and † denotes the corresponding author)
|
|
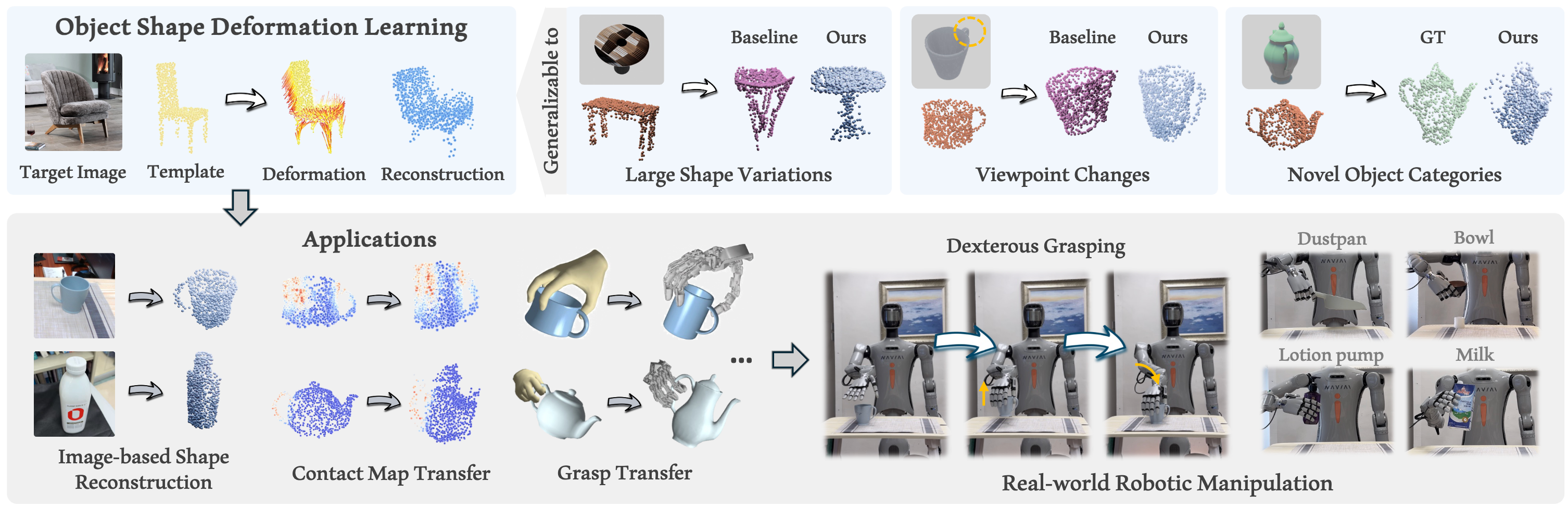
Geometry-Guided Modeling of Foundation Features Enables Generalizable Object Shape Deformation Learning
Yiyao Ma, Kai Chen, Zhongxiang Zhou, Zhuheng Song, Dongsheng Xie, Zelong Tan, Rong Xiong, Qi Dou.
The International Conference on Machine Learning (ICML), 2026.
[paper] [project]
|
|
|
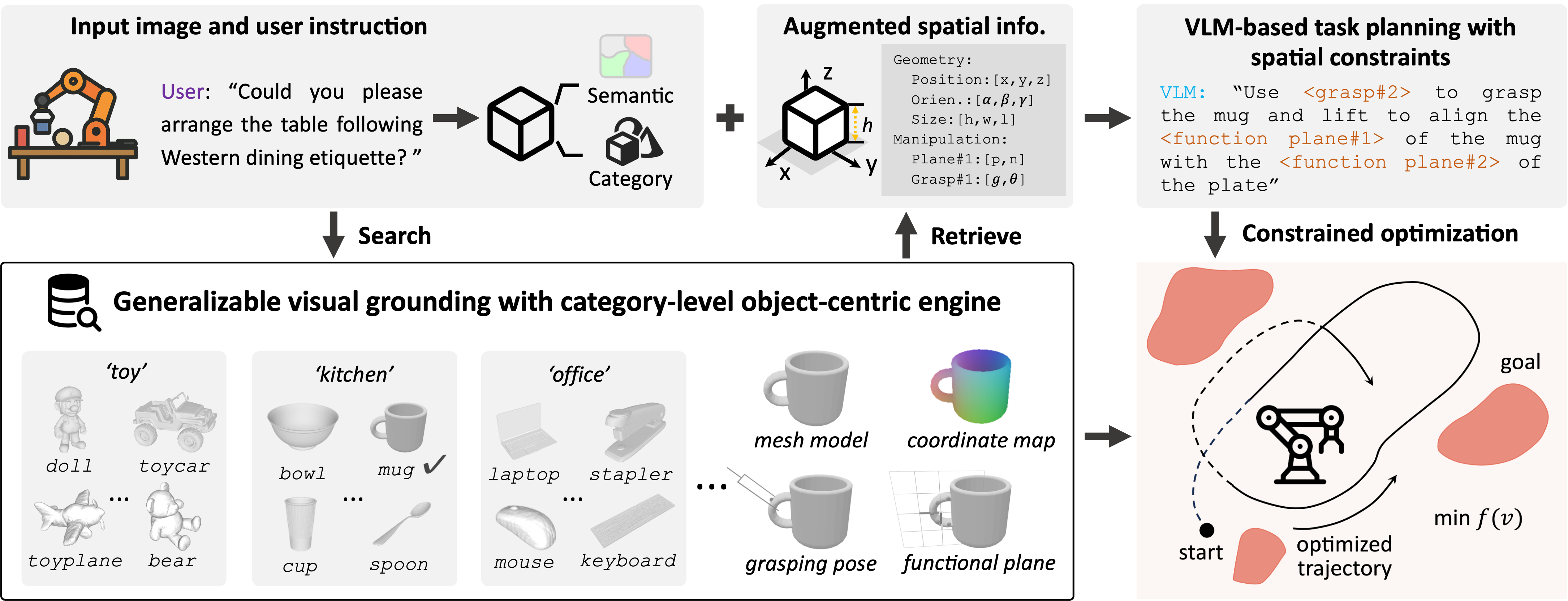
A Retrieval-augmented Framework Enabling VLM Spatial Awareness for Object-centric Robot Manipulation
Kai Chen, Chengkun Li, Chang Tu, Jiahui Pan, Yiyao Ma, Wei Chen, Zhongxiang Zhou, Xuecheng Xu, Stephen James, Chi-Wing Fu, Rong Xiong, Pieter Abbeel, Yun-Hui Liu, Qi Dou.
Science Robotics, 2026.
[paper] [project]
|
|
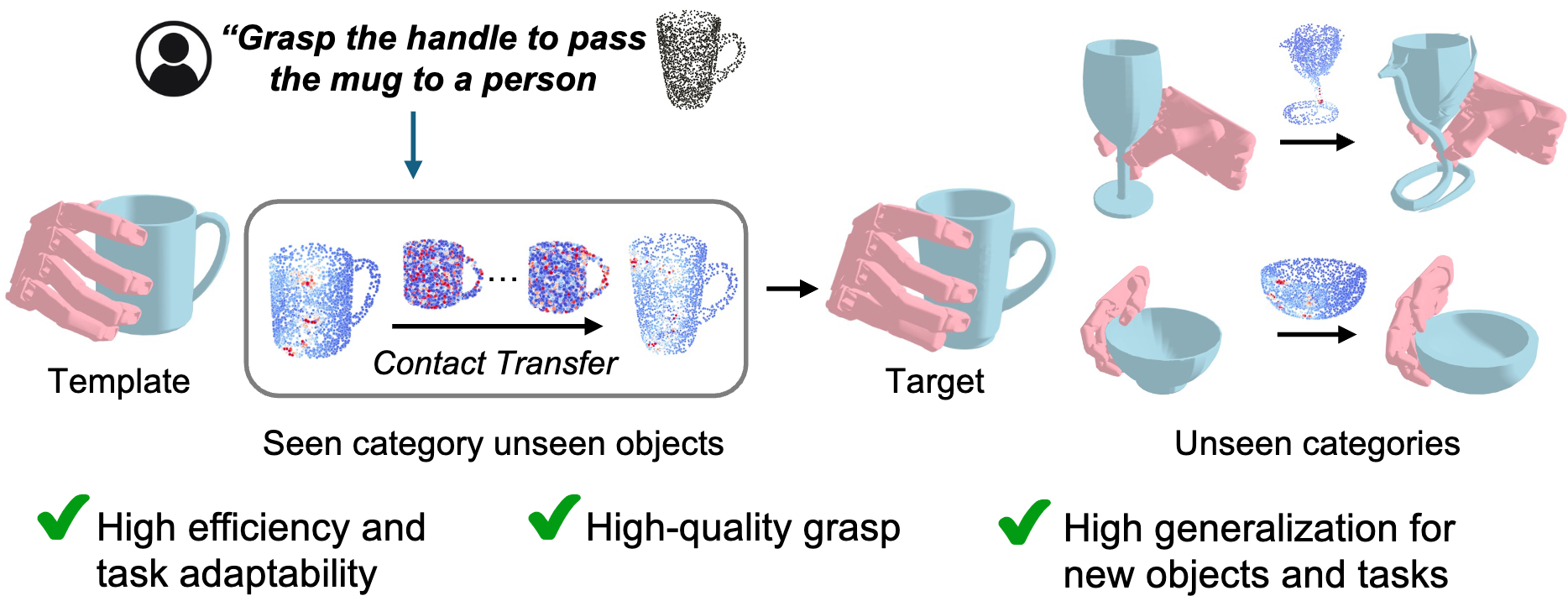
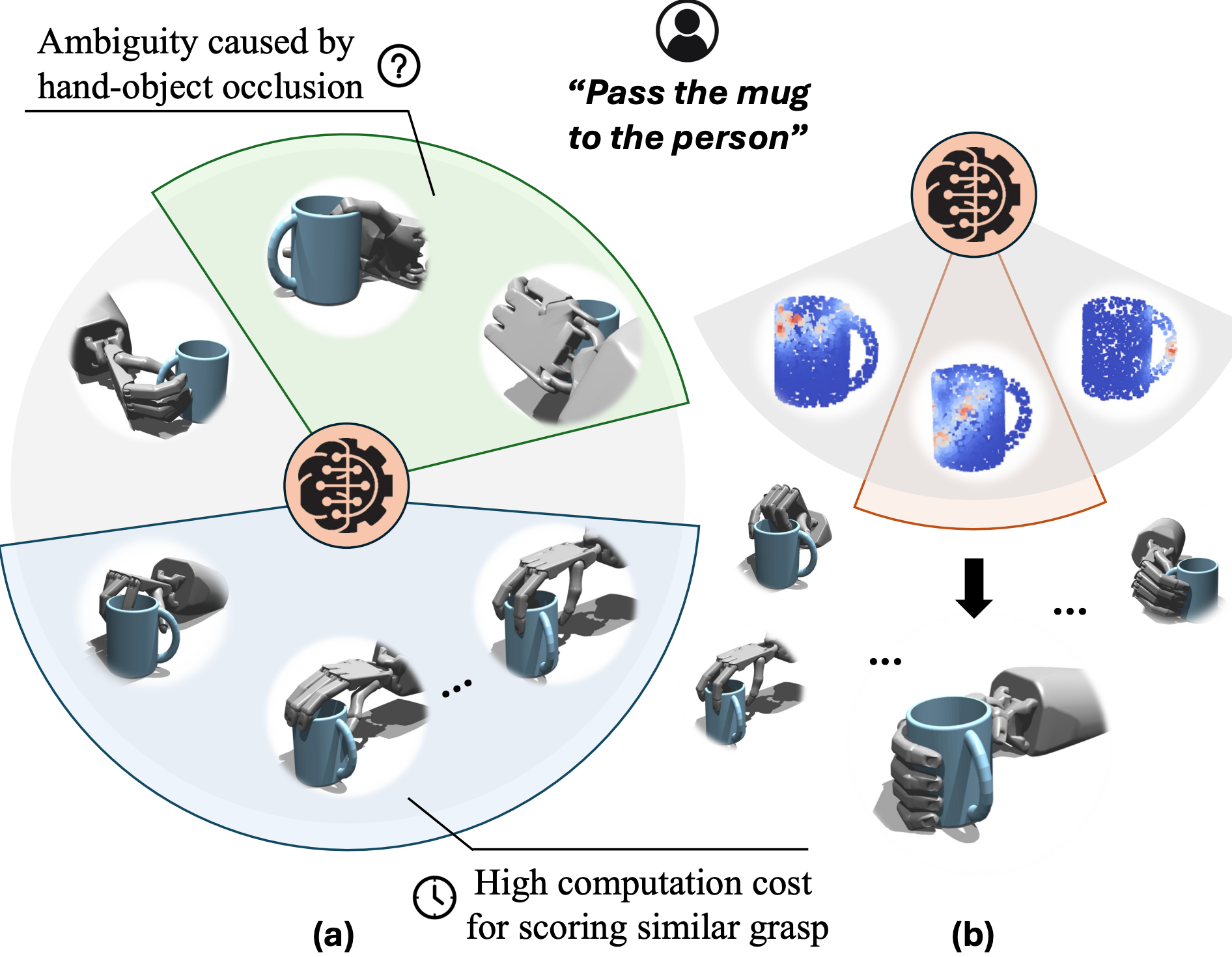
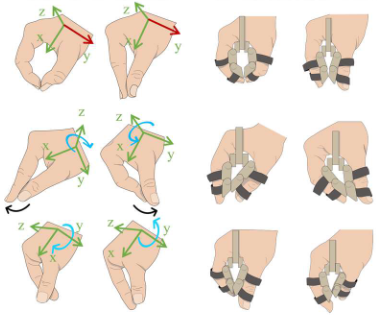
Contact Map Transfer with Conditional Diffusion Model for Generalizable Dexterous Grasp Generation
Yiyao Ma, Kai Chen†, Kexin Zheng, Qi Dou.
Conference on Neural Information Processing Systems (NeurIPS), 2025.
[paper] [project]
|
|
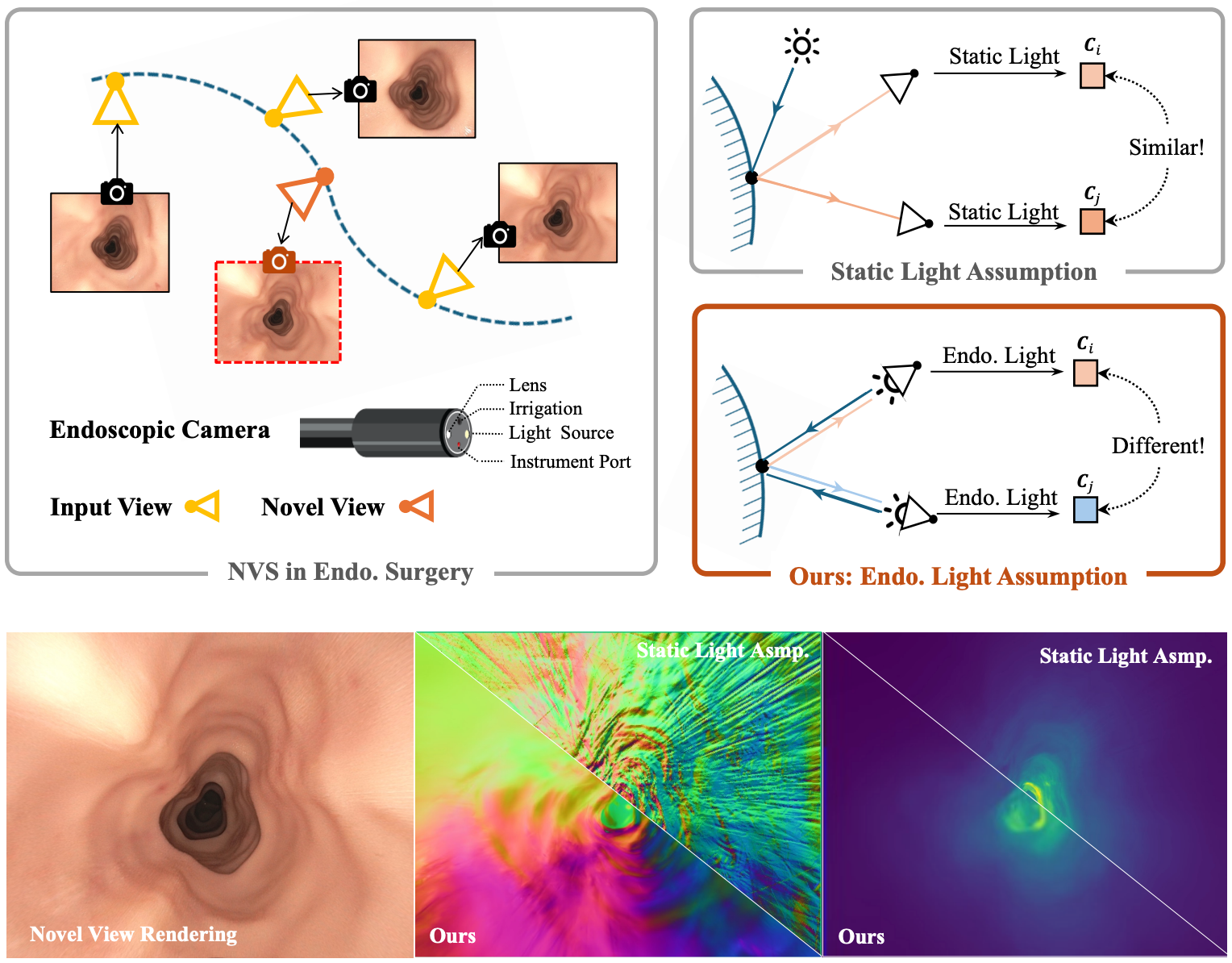
Gaussian Splatting with Reflectance Regularization for Endoscopic Scene Reconstruction
Chengkun Li, Kai Chen, Shi Qiu, Jason Ying-Kuen Chan, Qi Dou.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
[paper] [project]
|
|
ColaDex: Contact-guided Optimization and VLM-assisted Selection for Task-oriented Dexterous Grasp Generation
Yiyao Ma, Kai Chen, Xuecheng Xu, Zhongxiang Zhou, Liang Xie, Rong Xiong, Qi Dou.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
[paper] [project]
|
|
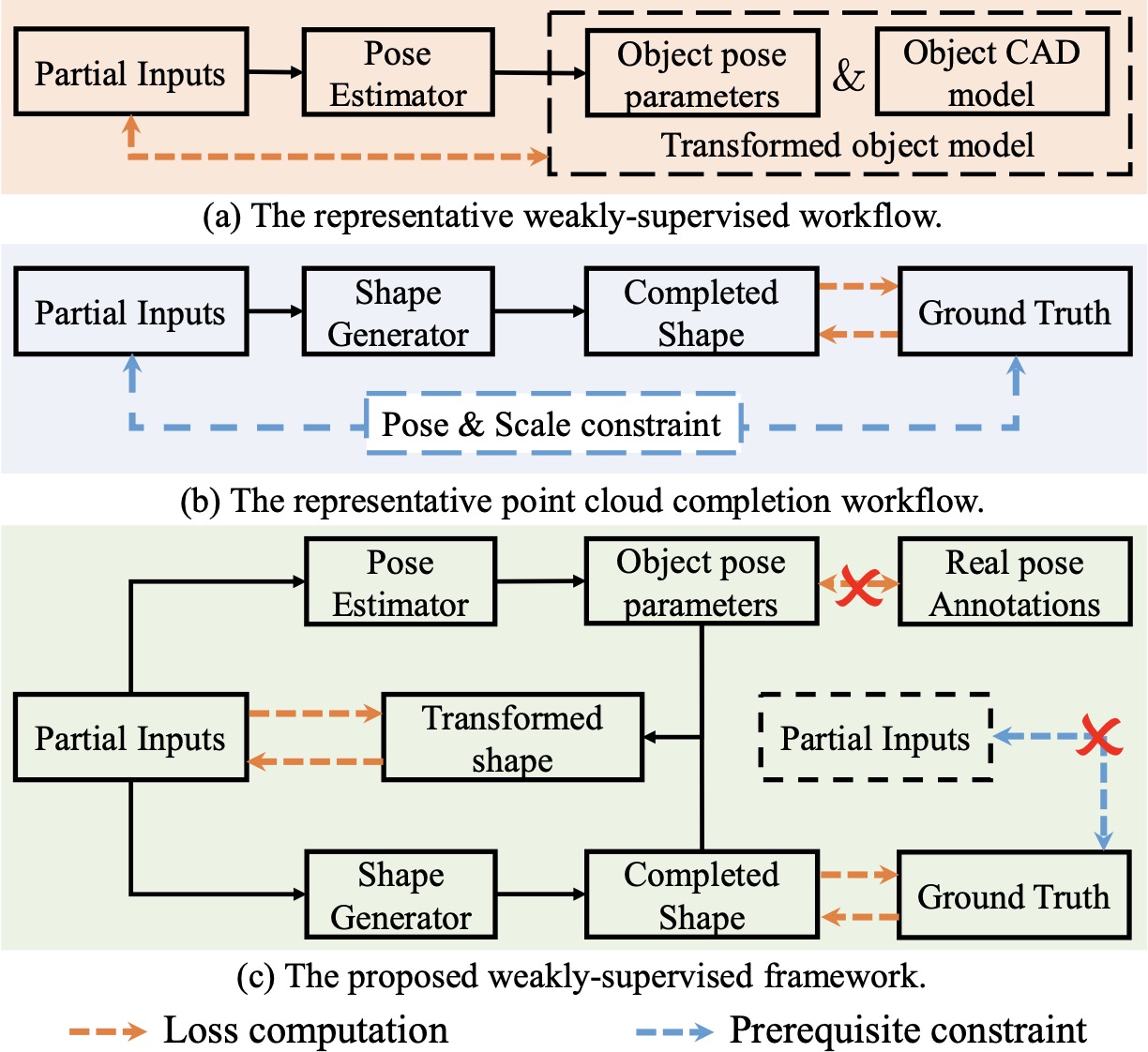
Canonical Shape Reconstruction with SE(3) Equivariance Learning for Weakly-Supervised Object Pose Estimation
Jun Zhou, Kai Chen†, Mingqiang Wei, Xiao-Ping Zhang, Qi Dou, Jing Qin.
IEEE Transactions on Circuits and Systems for Video Technology, 2025.
[paper] [project]
|
|
DIH-Tele: Dexterous In-Hand Teleoperation Framework for Learning Multi-Object Manipulation with Tactile Feedback
Junda Huang, Kai Chen, Jianshu Zhou, Xingyu Lin, Pieter Abbeel, Qi Dou, Yun-Hui Liu.
IEEE/ASME Transactions on Mechatronics, 2025.
[paper]
|
|
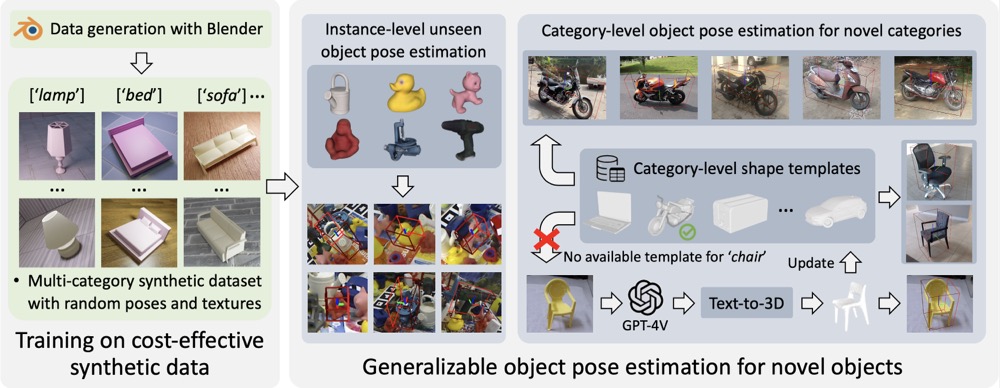
Vision Foundation Model Enables Generalizable Object Pose Estimation
Kai Chen, Yiyao Ma, Xingyu Lin, Stephen James, Jianshu Zhou, Yun-Hui Liu, Pieter Abbeel, Qi Dou.
Conference on Neural Information Processing Systems (NeurIPS), 2024.
[paper] [project]
|
|
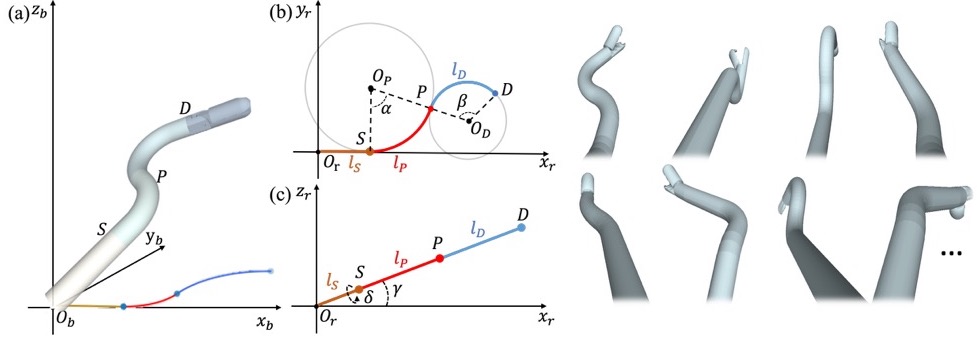
Shape-guided Configuration-aware Learning for Endoscopic-image-based Pose Estimation of Flexible Robotic Instruments
Yiyao Ma*, Kai Chen*, Hon-Sing Tong, Ruofeng Wei, Yui-Lun Ng, Ka-Wai Kwok, Qi Dou.
European Conference on Computer Vision (ECCV), 2024.
[paper] [project]
|
|
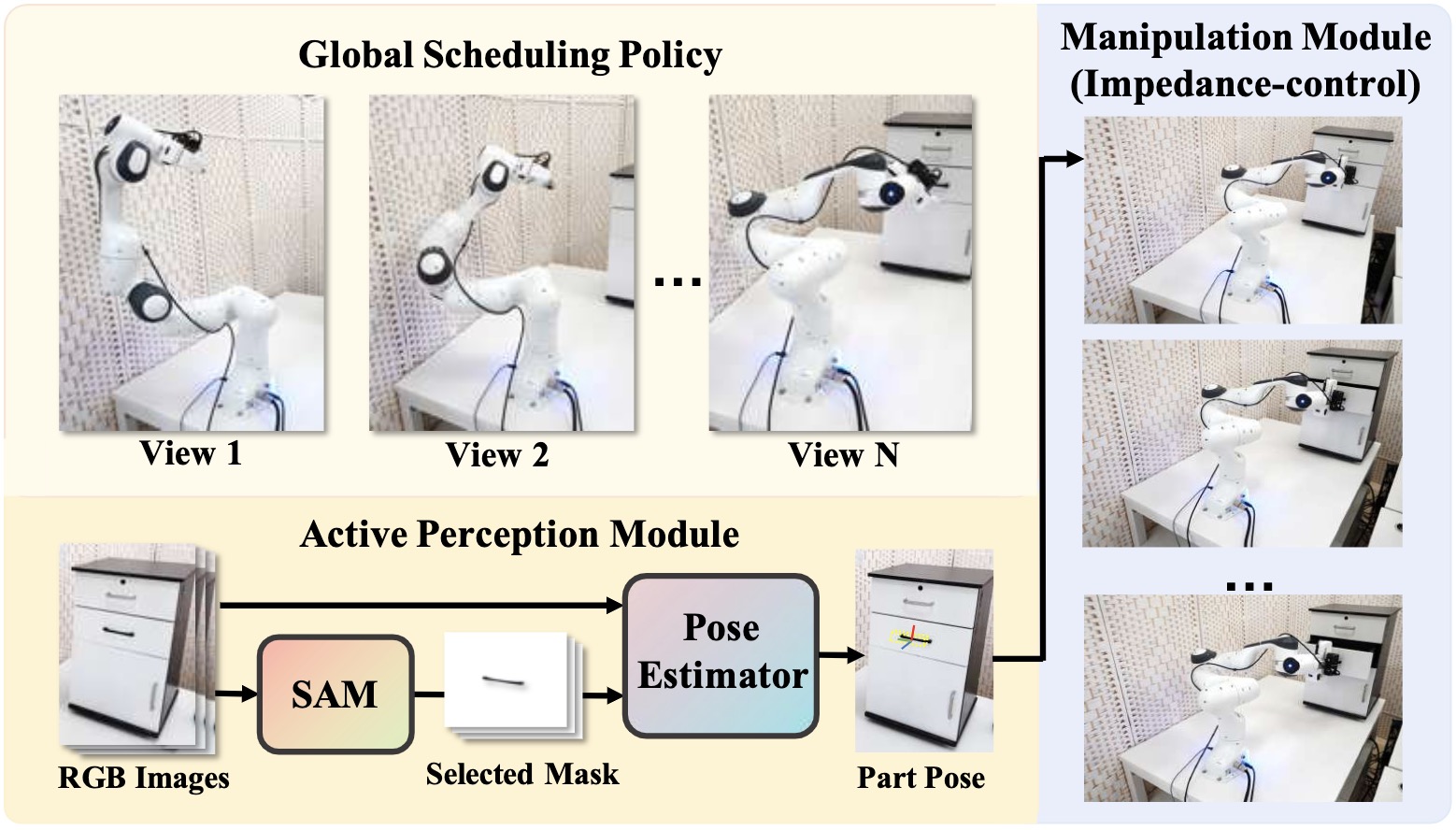
RGBManip: Monocular Image-based Robotic Manipulation through Active Object Pose Estimation
Boshi An*, Yiran Geng*, Kai Chen*, Xiaoqi Li, Qi Dou, Hao Dong.
IEEE International Conference on Robotics and Automation (ICRA), 2024.
[paper] [project]
|
|
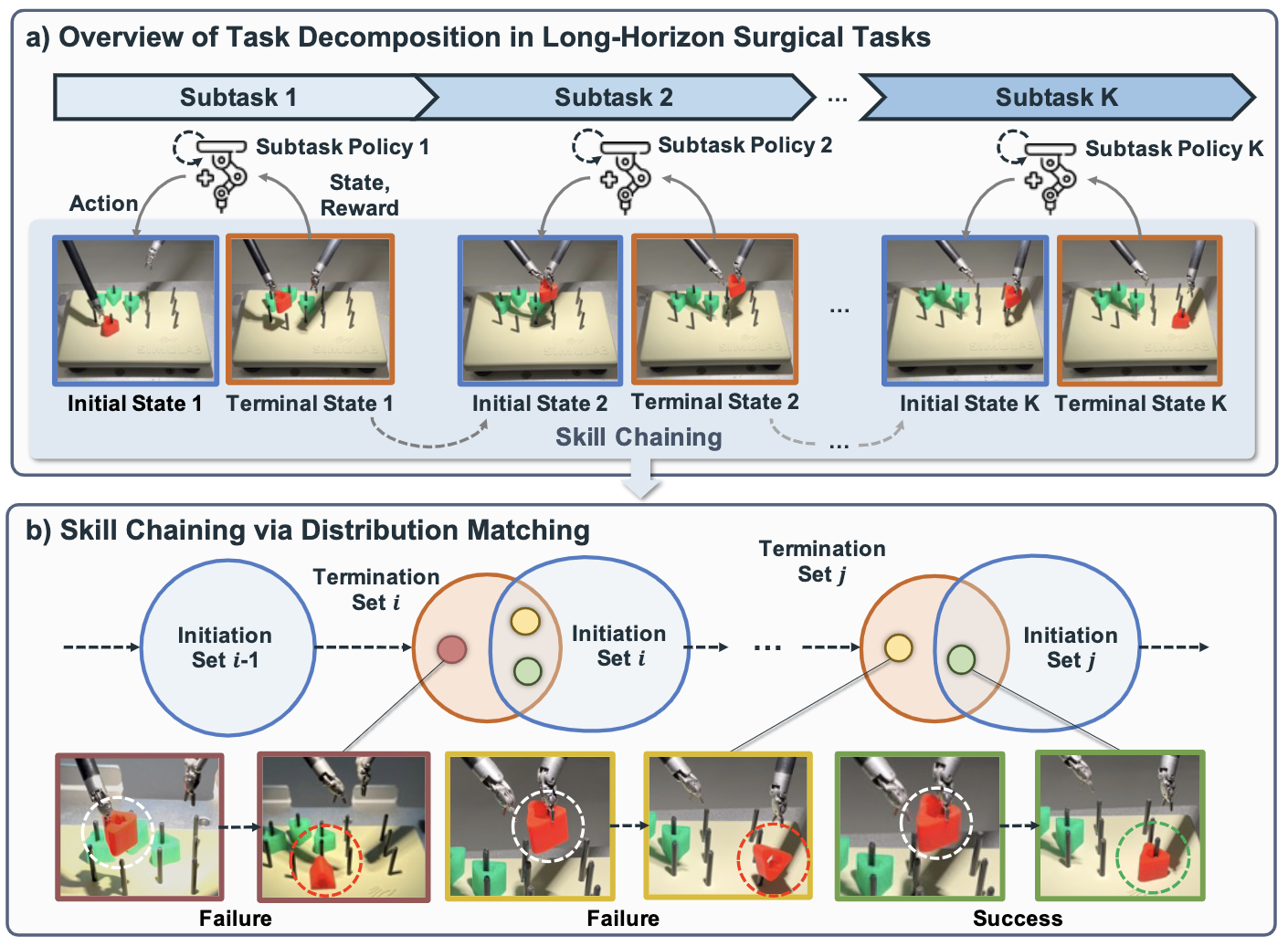
Value-Informed Skill Chaining for Policy Learning of Long-Horizon Tasks with Surgical Robot
Tao Huang, Kai Chen, Wang Wei, Jianan Li, Yonghao Long, Qi Dou.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
[paper] [project]
|
|
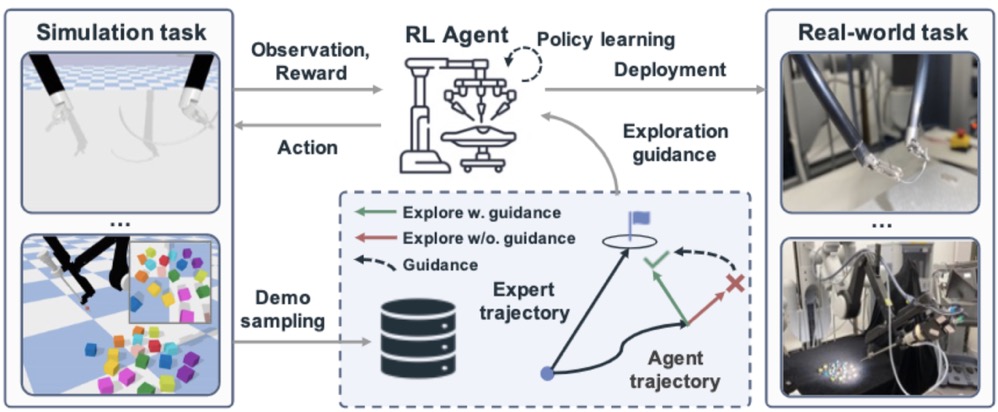
Demonstration-Guided Reinforcement Learning with Efficient Exploration for Task Automation of Surgical Robot
Tao Huang, Kai Chen, Bin Li, Yun-Hui Liu, Qi Dou.
IEEE International Conference on Robotics and Automation (ICRA), 2023.
[paper] [project]
|
|
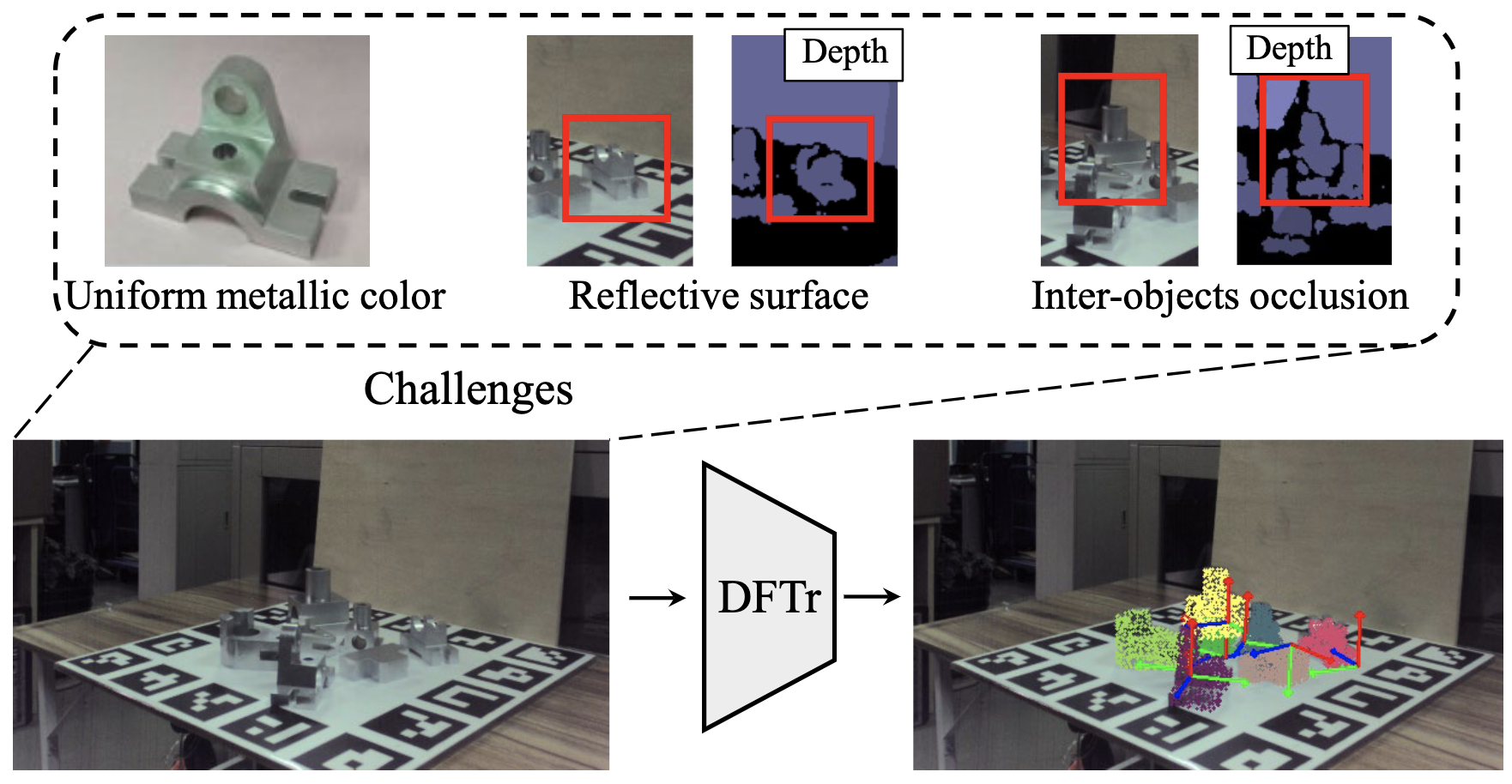
Deep Fusion Transformer Network with Weighted Vector-Wise Keypoints Voting for Robust 6D Object Pose Estimation
Jun Zhou*, Kai Chen*, Linlin Xu, Qi Dou, Jing Qin.
IEEE/CVF International Conference on Computer Vision (ICCV), 2023.
[paper] [project]
|
|
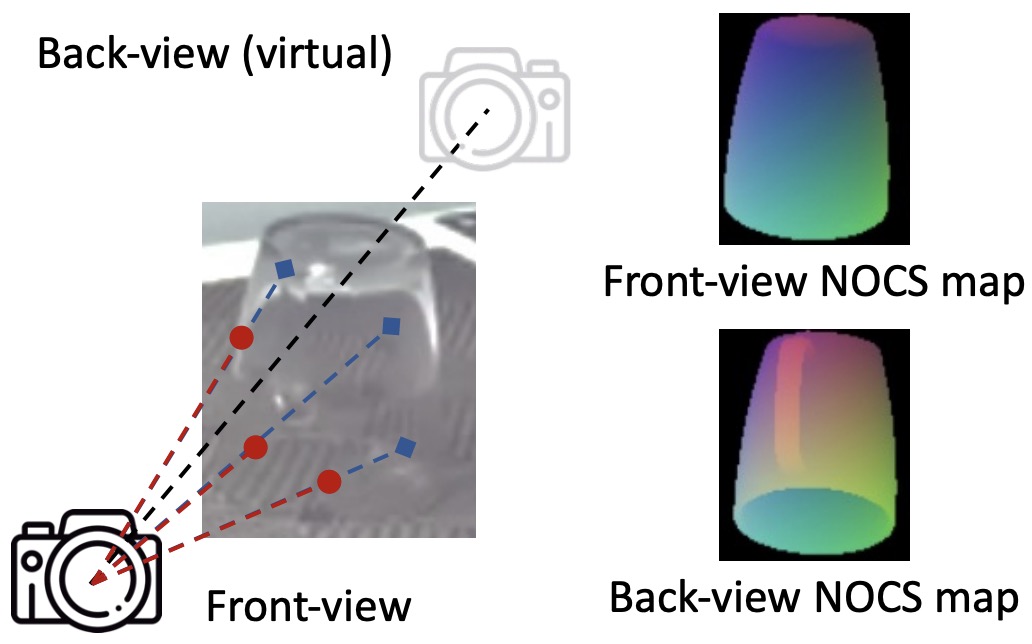
StereoPose: Category-Level 6D Transparent Object Pose Estimation from Stereo Images via Back-View NOCS
Kai Chen, Stephen James, Congying Sui, Yun-Hui Liu, Pieter Abbeel, Qi Dou.
IEEE International Conference on Robotics and Automation (ICRA), 2023.
[paper] [project]
|
|
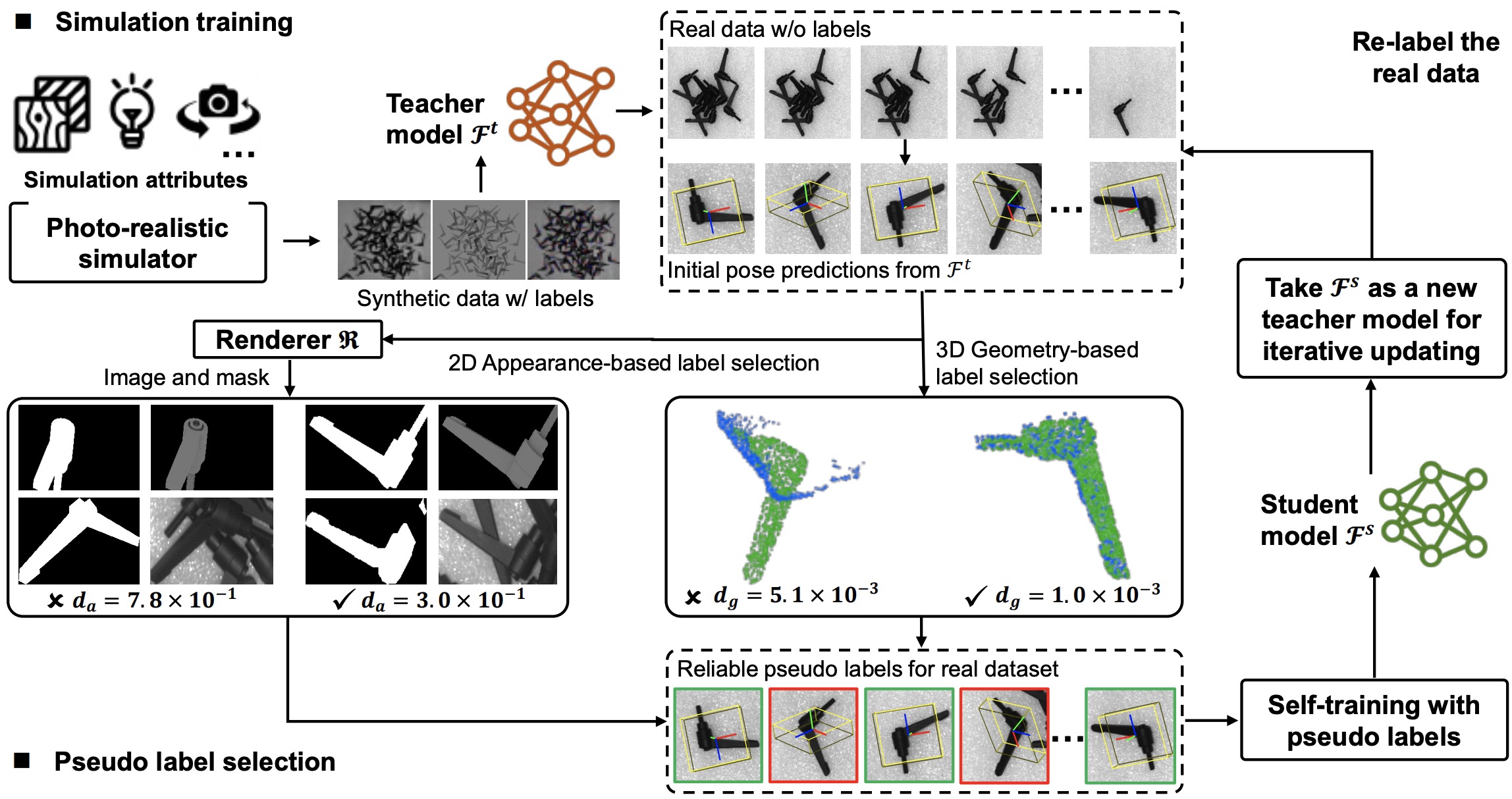
Sim-to-Real 6D Object Pose Estimation via Iterative Self-training for Robotic Bin Picking
Kai Chen, Rui Cao, Stephen James, Yichuan Li, Yun-Hui Liu, Pieter Abbeel, Qi Dou.
European Conference on Computer Vision (ECCV), 2022.
[paper] [project]
|
|
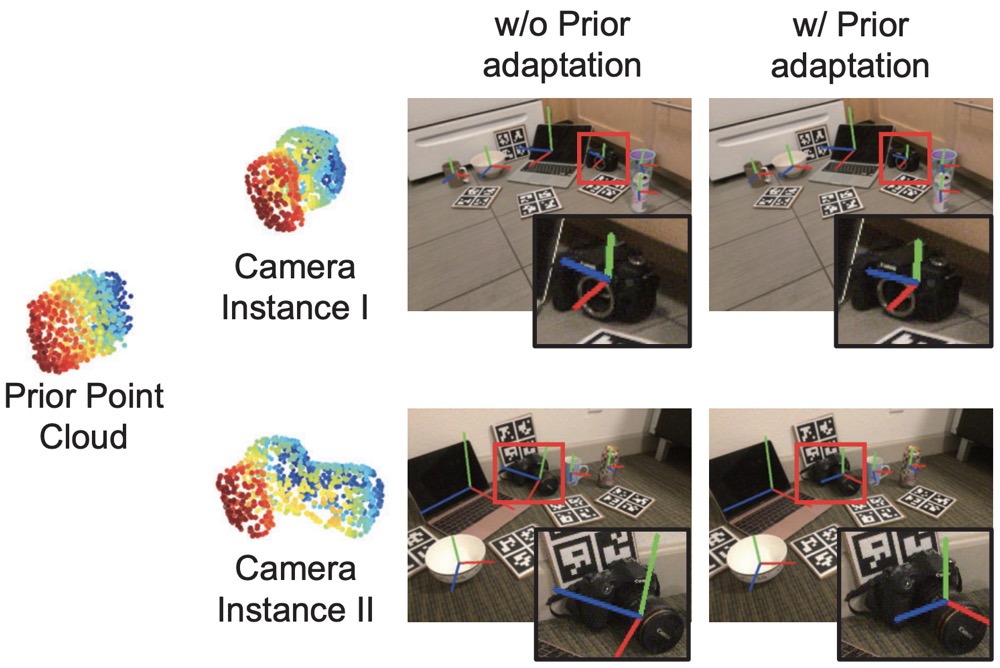
SGPA: Structure-Guided Prior Adaptation for Category-Level 6D Object Pose Estimation
Kai Chen, Qi Dou.
IEEE/CVF International Conference on Computer Vision (ICCV), 2021.
(Oral)
[paper] [project]
|
|
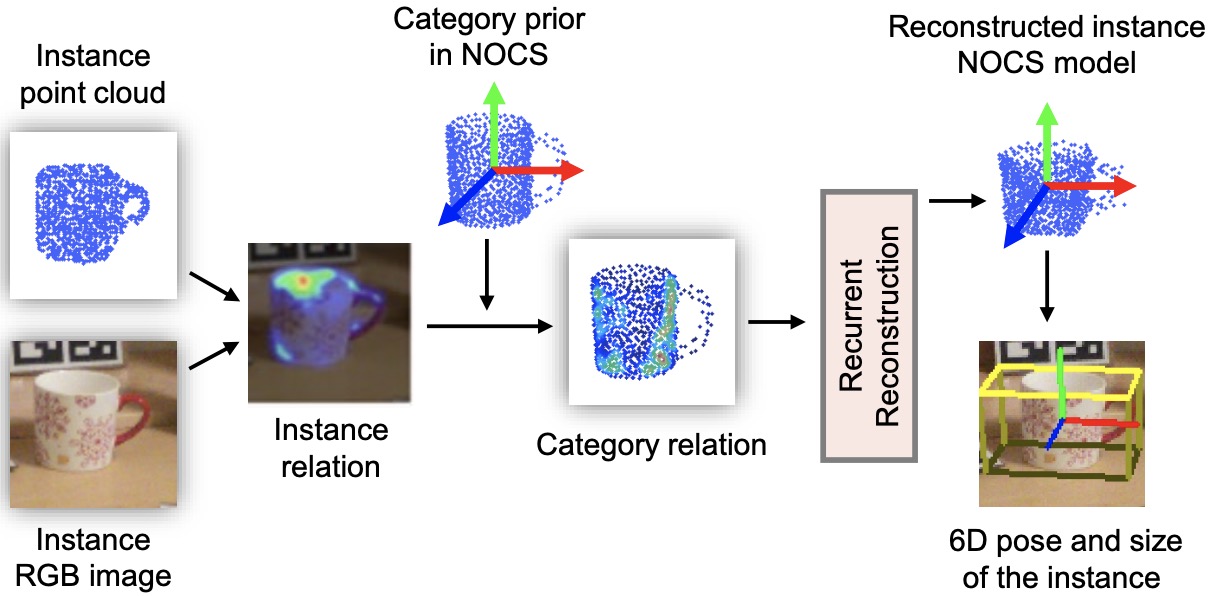
Category-level 6D Object Pose Estimation via Cascaded Relation and Recurrent Reconstruction Networks
Jiaze Wang*, Kai Chen*, Qi Dou.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
[paper] [project]
|
|
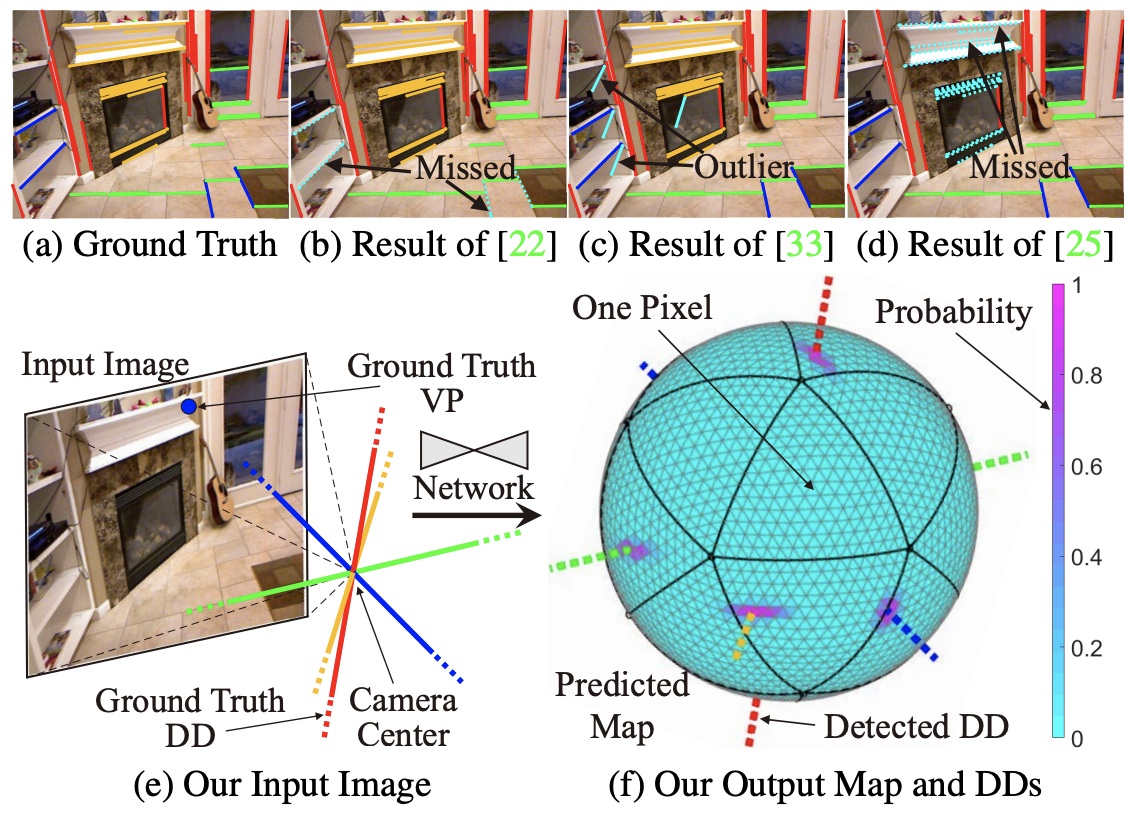
Learning Icosahedral Spherical Probability Map based on Bingham Mixture Model for Vanishing Point Estimation
Haoang Li*, Kai Chen*, Pyojin Kim, Kuk-Jin Yoon, Zhe Liu, Kyungdon Joo, Yun-Hui Liu.
IEEE/CVF International Conference on Computer Vision (ICCV), 2021.
[paper]
|
|
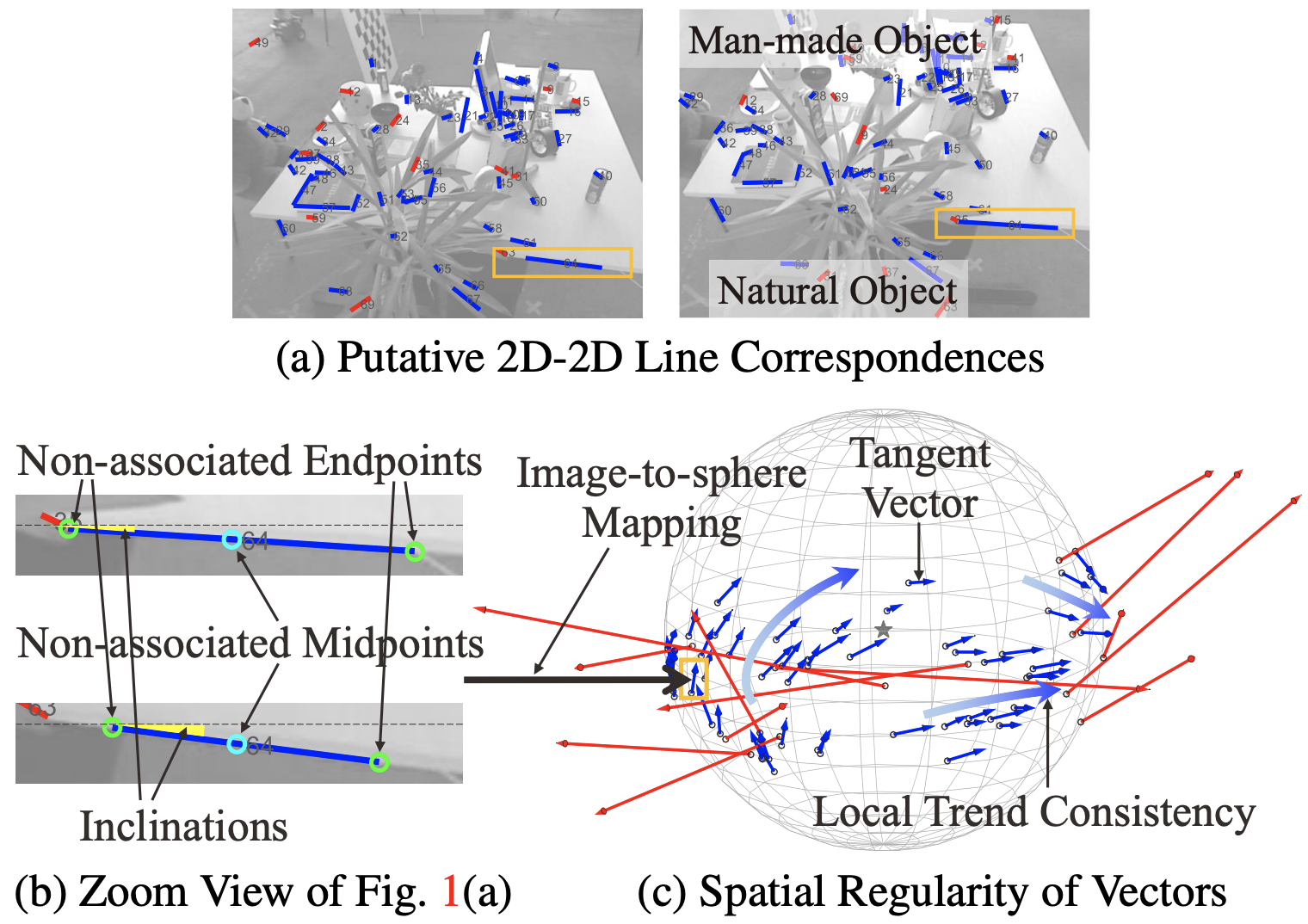
Learning to Identify Correct 2D-2D Line Correspondences on Sphere
Haoang Li, Kai Chen, Ji Zhao, Jiangliu Wang, Pyojin Kim, Zhe Liu, Yun-Hui Liu.
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2021.
[paper]
|
|
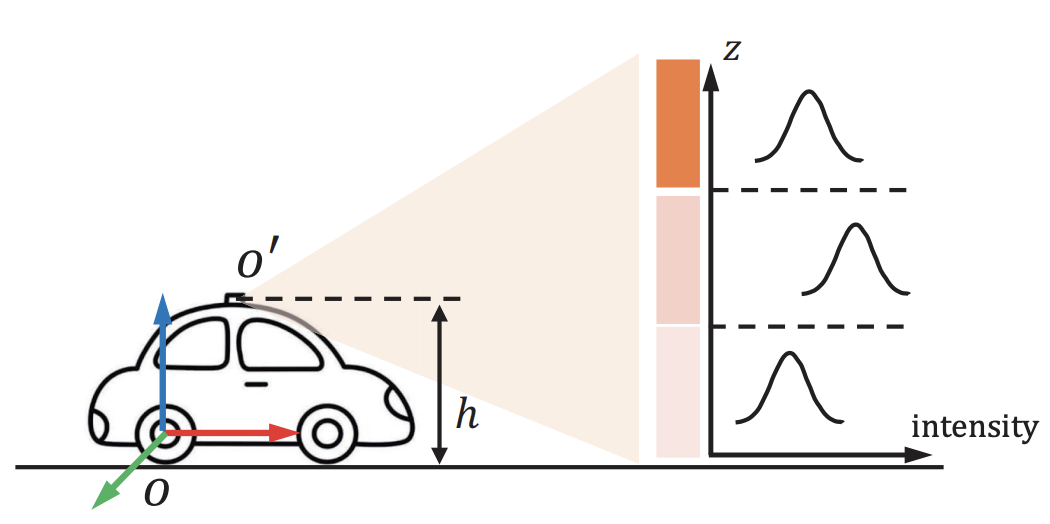
CLMM-Net: Robust Cascaded LiDAR Map Matching based on Multi-Level Intensity Map
Kai Chen, Lei He, Xiaofeng Wang, Yuqian Liu, Ming Zhao.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
[paper]
|
|
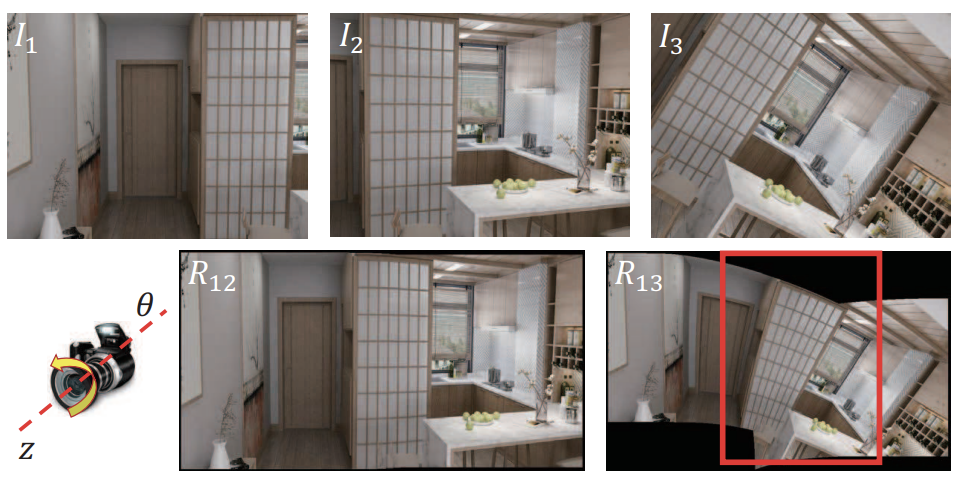
Vanishing Point Guided Natural Image Stitching
Kai Chen, Jian Yao, Jingmin Tu, Yahui Liu, Yinxuan Li, Li Li.
arXiv preprint arXiv:2004.02478, 2020.
[paper]
|
